4 The Six Iterations
From 0 % to 96.7 % — Step by Step
Each iteration changed one thing, measured the outcome, and traced the improvement or failure back to a specific design decision.
| Iteration | Steps | Success | Mean stand time | Key change |
|---|---|---|---|---|
| 1 — Reward v1 | 3 M | 0 % | 159 | Baseline: alive-bonus + height + upright. Robot exploits reward, flails. |
| 2 — Pose reference | 5 M | 5 % | 456 | Human-in-the-loop: explicit stand-pose reference added as dominant reward term. |
| 3 — Resume | 15 M | 25 % | 594 | Continued from Iter 2. Upward trend but training instability (clip_fraction 0.76). |
| 4 — Stabilised | 25 M | 83.3 % | 930 | Learning rate 3e-4 → 1e-4. Clean convergence; robot stands upright. |
| 5 — Stillness | 35 M | 90 % | 949 | Velocity penalty over all joints. XY-drift cut from 3.4 m to 0.53 m. |
| 6 — Lower/Upper + Foot-Lock | 45 M | 96.7 % | 990 | Anatomic split: legs penalised harder than arms. Foot-position lock added. |
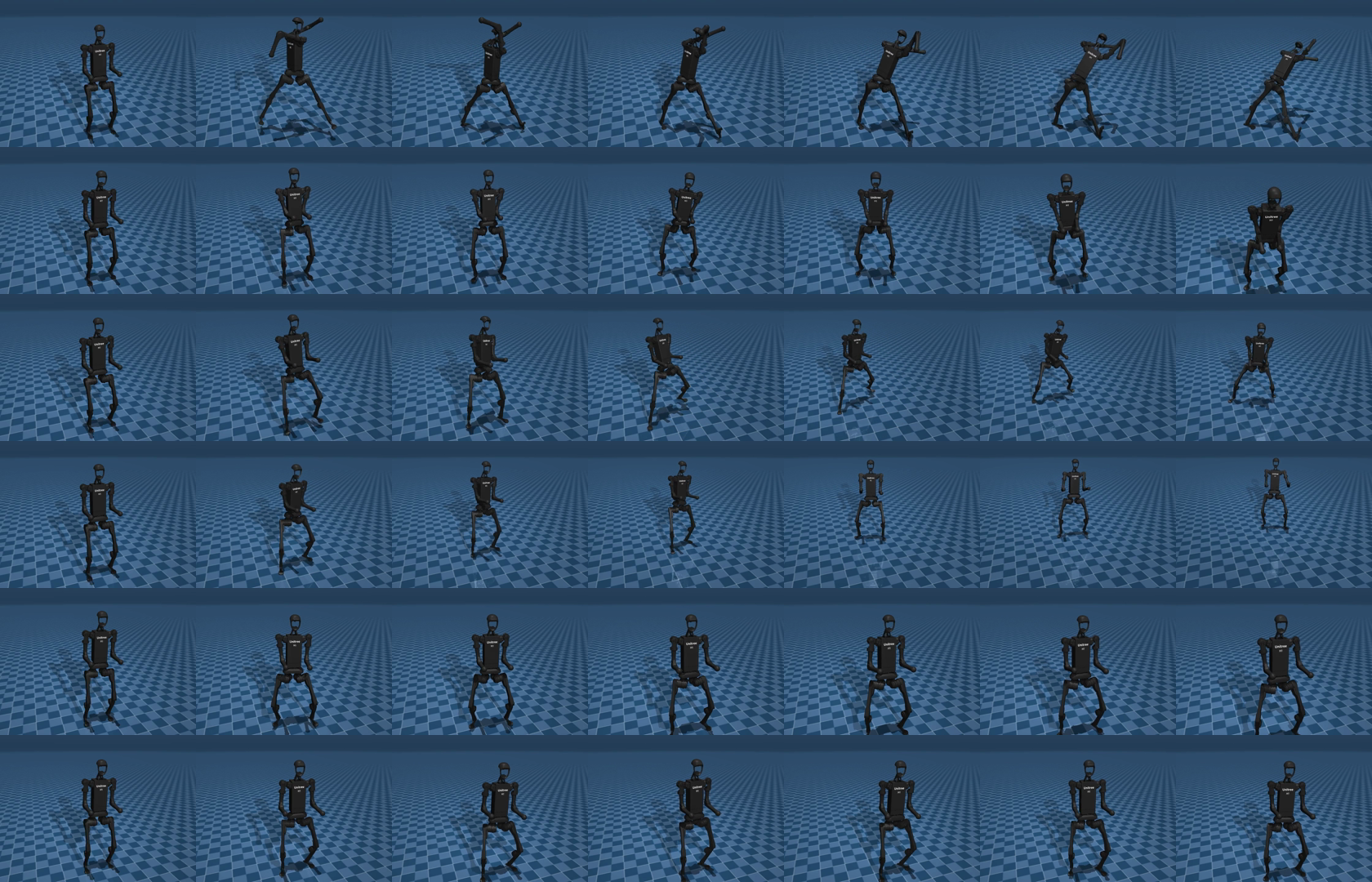
All 6 iterations — top to bottom
Iter 1 (flailing) → Iter 2 (hunched) → 15 M (holds slightly bent) → 25 M (upright) → Iter 5 (still) → Iter 6 (peak)

Iteration 1 — flails & falls
3 M steps · 0 % success · arms fully extended, collapses fast
Failed

Iteration 2 — hunched, more stable
5 M steps · 5 % success · pose-reference reward takes effect
Breakthrough

15 M steps — holds, slightly bent
Iter 3 · 25 % success · longer stand time, training still noisy
Progress

25 M steps — stands upright
Iter 4 · 83 % success · full 1000-step episode, stable & calm
Goal reached

Iteration 5 — stillness, uniform penalty
Velocity penalty across all joints · 90 % success · drift drops to 0.53 m
Progress

Iteration 6 — Lower/Upper-Split + Foot-Lock
Anatomically differentiated · 96.7 % success · maximum stability & uprightness
Peak